11. Mass and Center of Mass
c. Moment of Inertia
1. Bar with Non-Uniform Density
When a point particle with mass \(m\) moves along any path, its motion is controlled by Newton's Second Law for Linear Motion: \[ \vec{F}=m\vec{a} \] where \(\vec{F}\) is the force and \(\vec{a}=\dfrac{d^2\vec{x}}{dt^2}\) is its acceleration. The mass \(m\) measures the inertia which is the amount the body resists the force which is accelerating the body.
In the special case, when a point mass \(m\) moves around a circle of radius \(r\) centered at some pivot point, its motion is controlled by Newton's Second Law for Rotational Motion: \[ \tau=I\alpha \] where \(\tau=rF_\perp\) is the torque, \(F_\perp\) is the component of the force perpendicular to the radius, \(I=mr^2\) is the moment of inertia and \(\alpha=\dfrac{d^2\theta}{dt^2}\) is its angular acceleration. The moment of inertia \(I\) measures the amount the inertia of the body resists the torque which is changing the rotation of the body.
If there are several point masses \(m_1,m_2,\ldots,m_n\) at radii \(r_1,r_2,\ldots,r_n\) from the pivot point, acted on by forces \(F_1,F_2,\ldots F_n\), respectively, then the total torque is the sum: \[ \tau=r_1F_{\perp 1}+r_2F_{\perp 2}+\cdots+r_n F_{\perp n} \] and the total moment of inertia is the sum: \[ I=m_1r_1^2+m_2r_2^2+\cdots+m_n r_n^2 \] We here concentrate on finding the total moment of inertia of an extended object in the shape of a bar.
Find the moment of inertia of a bar between \(x=a\) and \(x=b\) whose linear density is \(\delta(x)\) which is rotating about the pivot point \(x=x_0\).
As when we computed the total mass, we first cut up the bar into \(n\) small pieces each of width \(\Delta x=\dfrac{b-a}{n}\).
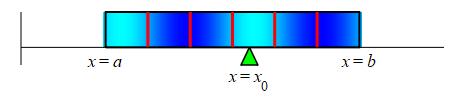
Since the density is not constant, we approximate the density of the \(i^\text{th}\) piece as \(\delta(x_i^*)\) where \(x_i^*\) is a point in the \(i^\text{th}\) region. Then the mass of the \(i^\text{th}\) region is approximately \(m_i=\delta(x_i^*)\Delta x\). This piece of mass is located at a radius of \(r_i=x_i^*-x_0\) from the pivot at \(x=x_0\). So its moment of inertia about \(x=x_0\) is approximately: \[ I_i=m_i(x_i^*-x_0)^2 =(x_i^*-x_0)^2\delta(x_i^*)\Delta x \] And the total moment of inertia is approximately: \[ I\approx \sum_{i=1}^n m_i(x_i^*-x_0)^2=\sum_{i=1}^n(x_i^*-x_0)^2\delta(x_i^*)\,\Delta x \] The approximation gets better as the number of pieces becomes large, (\(n\to\infty\)). In the limit, the moment of inertia of the bar is: \[ I=\lim_{n\to\infty}\sum_{i=1}^n (x_i^*-x_0)^2\delta(x_i^*)\Delta x \] We recognize this limit of a sum as the integral \(\displaystyle \int_a^b (x-x_0)^2\delta(x)\,dx\). By expanding the square and using the fact that \(x_0\) is a constant, we can rewrite the moment of inertia as \[\begin{aligned} I&=\int_a^b (x-x_0)^2\delta(x)\,dx \\ &=\int_a^b x^2\delta(x)\,dx-2x_0\int_a^b x\delta(x)\,dx +x_0^2\int_a^b \delta(x)\,dx \end{aligned}\] These three integrals are just the total mass and the first and second moments of the bar.
The moment of inertia of a bar with linear density
\(\delta(x))\) between \(x=a\) and \(x=b\) which is rotating about \(x=x_0\) is
\[
I=\int_a^b (x-x_0)^2\delta(x)\,dx
\]
or equivalently
\[
I=M_2-2x_0M_1+x_0^2M
\]
where the total mass is:
\(\displaystyle M=\int_a^b \delta(x)\,dx\)
the first moment of the mass is:
\(\displaystyle M_1=\int_a^b x\delta(x)\,dx\)
and the second moment of the mass is:
\(\displaystyle M_2=\int_a^b x^2\delta(x)\,dx\)
If a center of rotation is not specified, it is understood to be at \(x_0=0\), and then the moment of inertia is just the second moment: \[ I=\int_a^b x^2\delta(x)\,dx=M_2 \]
Find the moment of inertia of an \(8\,\text{m}\) bar whose linear density is \(\delta(x)=(1+x)\dfrac{\text{kg}}{\text{m}}\) if \(x\) is measured from one end and it rotates around the point \(x_0=2\,\text{m}\).
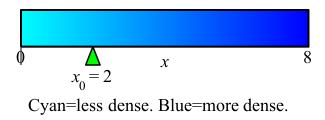
On the one hand, the moment of inertia is \[ I=\int_0^8 (x-2)^2\delta(x)\,dx =\int_0^8 (x-2)^2(1+x)\,dx \] To do this integral, we could expand it out. However, it is easier to make the substitution: \(u=x-2\), so that \(du=dx\) and \(x=u+2\). (Don't forget to change the limits.) \[\begin{aligned} I&=\int_{-2}^6 u^2(u+3)\,du =\int_{-2}^6 (u^3+3u^2)\,du \\ &=\left[\dfrac{u^4}{4}+u^3\right]_{-2}^6 \\ &=\left[\dfrac{6^4}{4}+6^3\right] -\left[\dfrac{(-2)^4}{4}+(-2)^3\right] \\ &=324+216-4+8 =544\,\text{kg-m}^2 \end{aligned}\]
On the other hand, in two previous examples, we computed the total mass is \(M=40\,\text{kg}\) and the first moment is \(\displaystyle M_1=\dfrac{608}{3}\,\text{kg-m}\). Similarly, the second moment is \[\begin{aligned} M_2&=\int_0^8 x^2\delta(x)\,dx =\int_0^8 x^2(1+x)\,dx \\ &=\int_0^8 x^2+x^3\,dx =\left[\dfrac{x^3}{3}+\dfrac{x^4}{4}\right]_0^8 \\ &=\dfrac{8^3}{3}+\dfrac{8^4}{4} =\dfrac{3584}{3}\,\text{kg-m}^2 \end{aligned}\] So the moment of inertia is again \[\begin{aligned} I&=M_2-2x_0M_1+x_0^2M \\ &=\dfrac{3584}{3}-4\cdot\dfrac{608}{3}+4\cdot40 = 544\,\text{kg-m}^2 \end{aligned}\]
The second method is most useful if you need to find the moment of inertia with several different pivot points.
Now you try:
Find the moment of inertia of a \(10\,\text{ft}\) bar whose linear weight density is \(\delta(x)=\dfrac{1}{1+x}\dfrac{\text{lb}}{\text{ft}}\) if \(x\) is measured from one end and it rotates about the end at \(x_0=0\).
_mass_pivot.jpg)
Since \(x_0=0\), the moment of inertia is just the second moment of the weight: \[ I=\int_a^b x^2\delta(x)\,dx=W_2 \]
\(I=40+\ln 11\approx 42.4\,\text{lb-ft}^2\)
Since \(x_0=0\), the moment of inertia is just the second moment of the weight: \[ I=W_2=\int_0^{10} x^2\delta(x)\,dx =\int_0^{10} \dfrac{x^2}{1+x}\,dx \] To do the integral, we use the substitution \(u=1+x\). Then \(x=u-1\) and \(dx=du\). So \[\begin{aligned} I&=\int_1^{11} \dfrac{(u-1)^2}{u}\,du =\int_1^{11} \dfrac{u^2-2u+1}{u}\,du \\ &=\int_1^{11} u-2+\dfrac{1}{u}\,du =\left[\dfrac{u^2}{2}-2u+\ln u\right]_1^{11} \\ &=\left[\dfrac{121}{2}-22+\ln 11\right]-\left[\dfrac{1}{2}-2+\ln 1\right] \\ &=\dfrac{120}{2}-20+\ln 11 =40+\ln 11\approx 42.4\,\text{lb-ft}^2 \end{aligned}\]
Heading
Placeholder text: Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum Lorem ipsum